

 QQ
QQ
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
您是否对将工业自动化集成到您的设施中感兴趣?如果是这样,那么您应该致电工业自动化和集成领域的领导者工博士。工博士是包括FANUC,Yaskawa,KUKA,Kawasaki和ABB在内的多家不同机器人公司的认证集成商。我们的员工致力于帮助您为您的行业和预算构建和定制完美的自动化系统。

如果机器人进程应由一个中央位置进行控制(如由一 个主机或PLC), 则这一控制通过外部自动运行接口进行。
2、系统结构原理.
为了在KRC4和PLC之间能够顺利进行通讯,必须满足以下凡点:
外部自动运行方式:在该运行方式下由一台主机或者PLC控制机器人系统
CELL.SRC:从外部选择机器人程序的控制程序。
PLC和机器人之间的信号交换:于配置输入和输出端信号的外部自动运行接口
发送至机器人的控制信号(输入端) :开始和停止信号、程序编号、故障确认机器人状态(输出端) :驱动装置状态位置、故障等等。
3、从外部启动程序的安全须知
选择了CELL程序后必须执行BCO运行。

前提条件:在运行方式T 1或T 2下
用于外部自动运行的输入/输出端和CELL.SRC程序已配置。
1.在导航器中选择CELL SRC程序。CELL程序始终在目录KRC:\R1下
2.将程序倍率设定为100%。(以 上为建议的设定值。也可根据需要设定其它数值。)
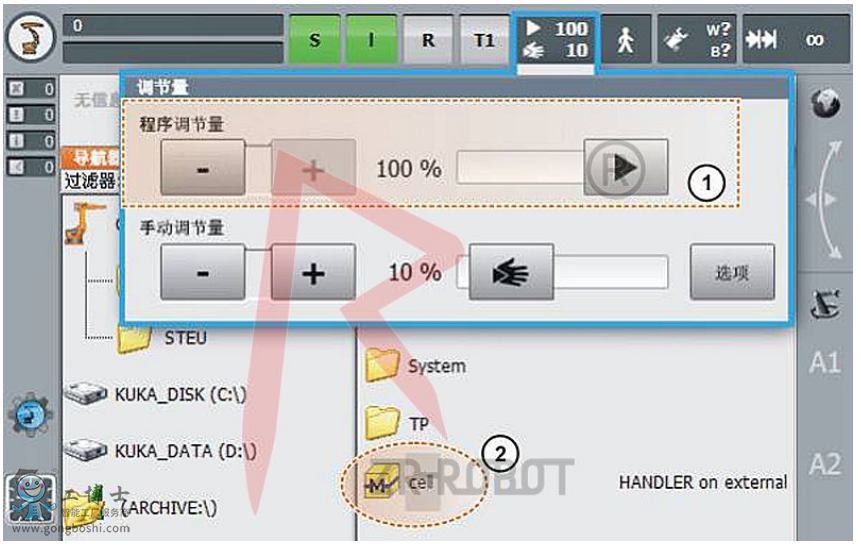
选择Cel和设置手动倍率
1HOV设置
2选定Cell.src
3.执行BCO运行:按住确认开关。然后按住启动按键,直至信息窗显示”已达BCO”。
4.选择”外部自动化”运行方式
5.在上一级控制系统(PLC)处启动程序。
5、Cell.src控制程序
管理由PLC传输的程序号时,需要使用控制程序Cll.srC。该程序始终位于文件夹"R1" 中。与任何常见的程序-样,Cell程 序也可以进行个性化调整,但程序的基本结构必须保持不变。
Cell程序的结构和功能:
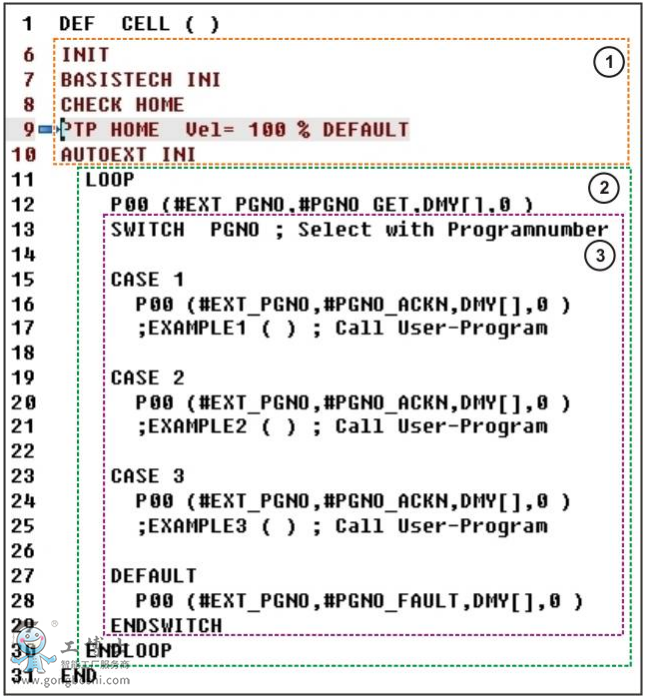
1、初始化和Home位置
初始化基坐标参数
根据"Home”位置检查机器人位置
初始化外部自动运行接口
2、无限循环:
通过模块"P00”询问程序号
进入已经确定程序号的选择循环。
3、程序号的选择循环
根据程序号(保存在变量"PGNO"中)跳转至相应的分支( "CASE" )中。
记录在分支中的机器人程序即被运行。
无效的程序号会导致程序跳转至“默认的”分支中。
运行成功结束后会自动重复这一循环。
6、操作步骤
1.切换到“专家”用户组
2.打开CELL. SRC。
3.在"CASE”段中将名称“EXAMPLE" 用应从相应的程序编号调出的程序的名称替换。删除名称前的分号。

图11-4:经适配的Cell程序举例
7.关闭程序并保存更改。
工博士可以提供了FANUC, Yaskawa, ABB,Kawasaki和 KUKA等各种新型机器人和常用机器人型号,工博士 现已经是集九大机器人代理品牌于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
了解更多可点击咨询:库卡机器人保养、库卡机器人维修、库卡机器人示教器维修
